Horus 1
Technical information:
| Launch date | 5/2/2010, 14:33 |
| Landing date | 5/2/2010, 16:30 |
| Flight duration | 2 hours, 57 minutes |
| Launch site | -35.1276, 138.8477 |
| Landing site | -35.0382, 139.2575 |
| Flight path | Web, KMZ |
| Distance traveled | 38.6 km |
| Maximum altitude | 29,606m |
| Average ascent rate | 8m/s |
| Impact speed | 15m/s (54km/h) |
| Flight computer | Arduino Duemilanove |
| GPS module | Trimble Lassen IQ |
| Radio transmitter | Radiometrix NTX2 25mw |
| Camera 1 | Panasonic Lumix DMC-LZ2 |
| Camera 2 | Kodak Easyshare C310 |
| Sensors | Internal & external temp, humidity, atmospheric pressure |
| Telemetry | 50 baud RTTY, XOR checksum |
| Tracking | Ground stations (distributed listener), 3 chase cars, web based tracker |
| Backup systems | SPOT satellite transponder, radiosonde |
Details:
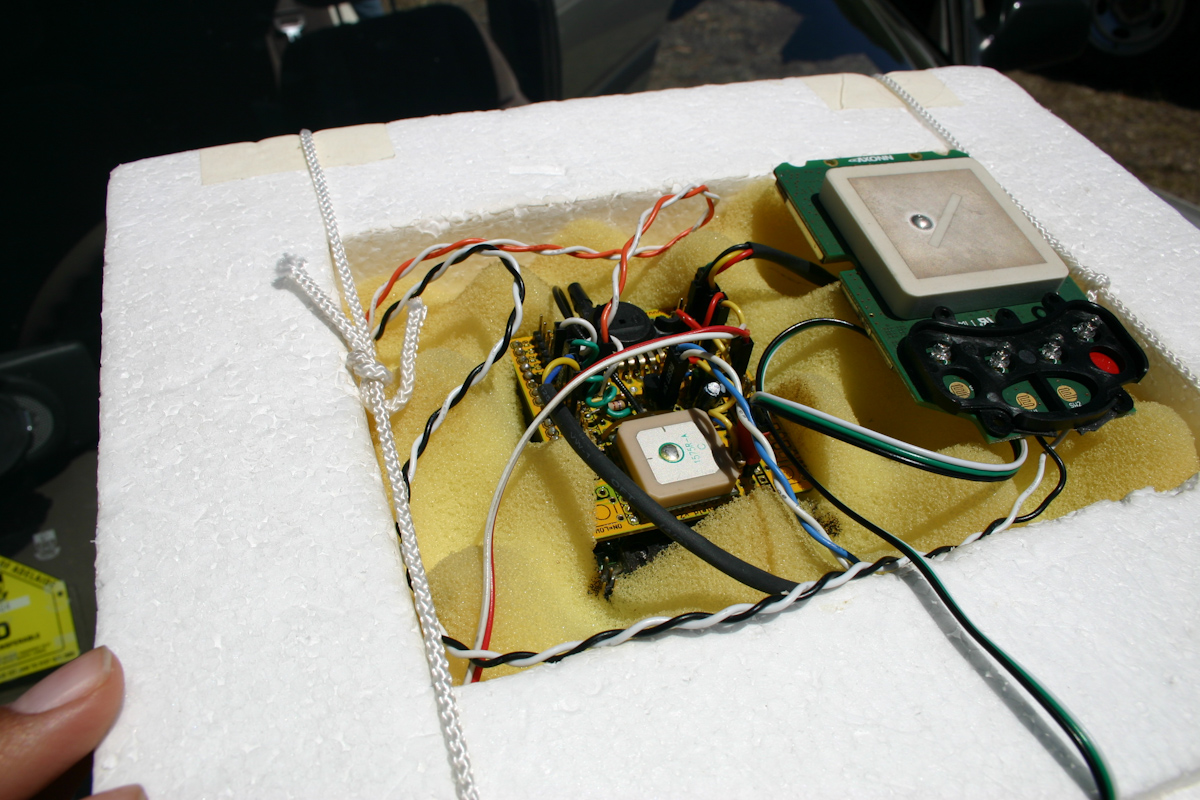
Horus 1 was my first high altitude balloon launch - I sourced a couple of cameras from eBay & built a flight computer around an Arduino and Ladyada's GPS shield with a Trimble Lassen IQ. Inspired by the usccess of UKHAS members, I bought a radiometrix NTX2 and ham radio receivers for telemetry.
Horus 1 included internal and external temperature sensors, as well as a relative humidity sensor, and an atmospheric pressure sensor (though this only had a range to about 15km altitude).
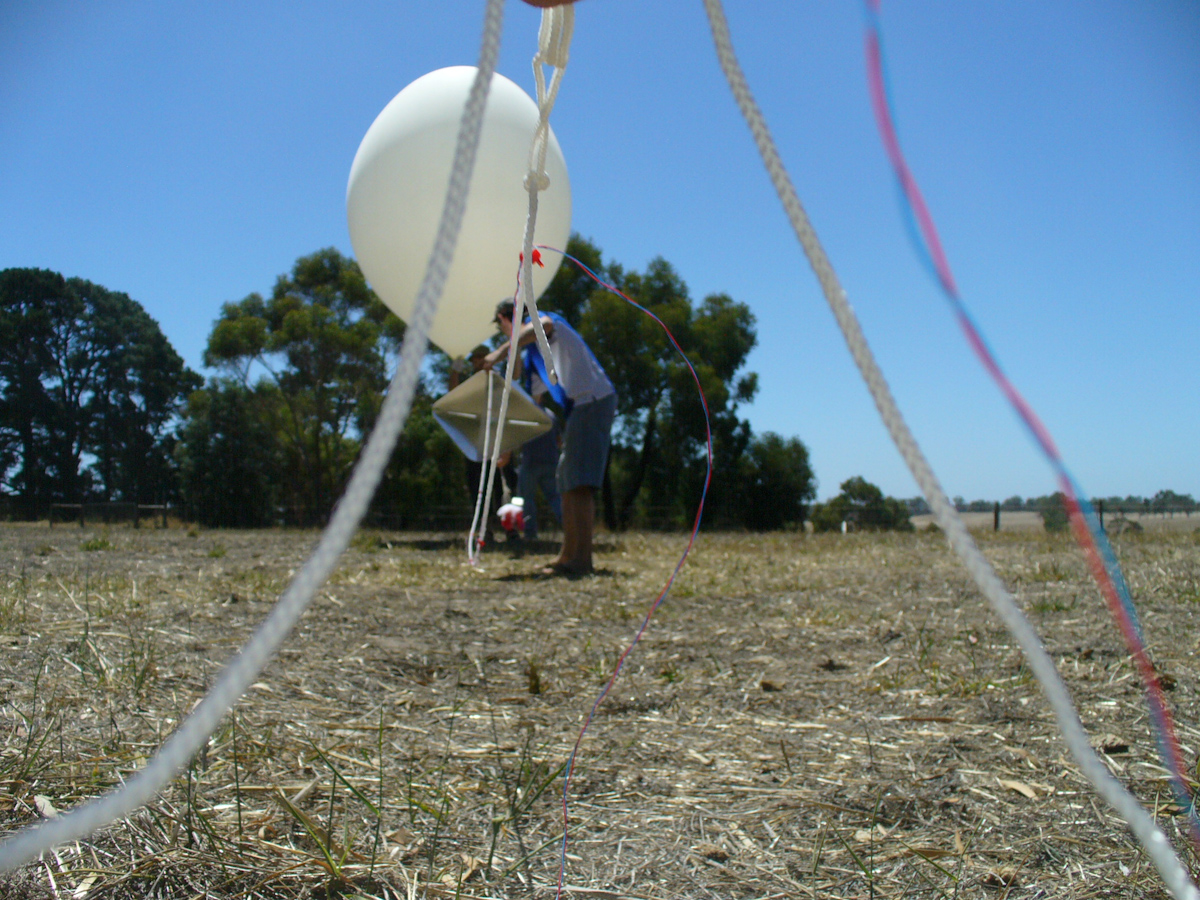
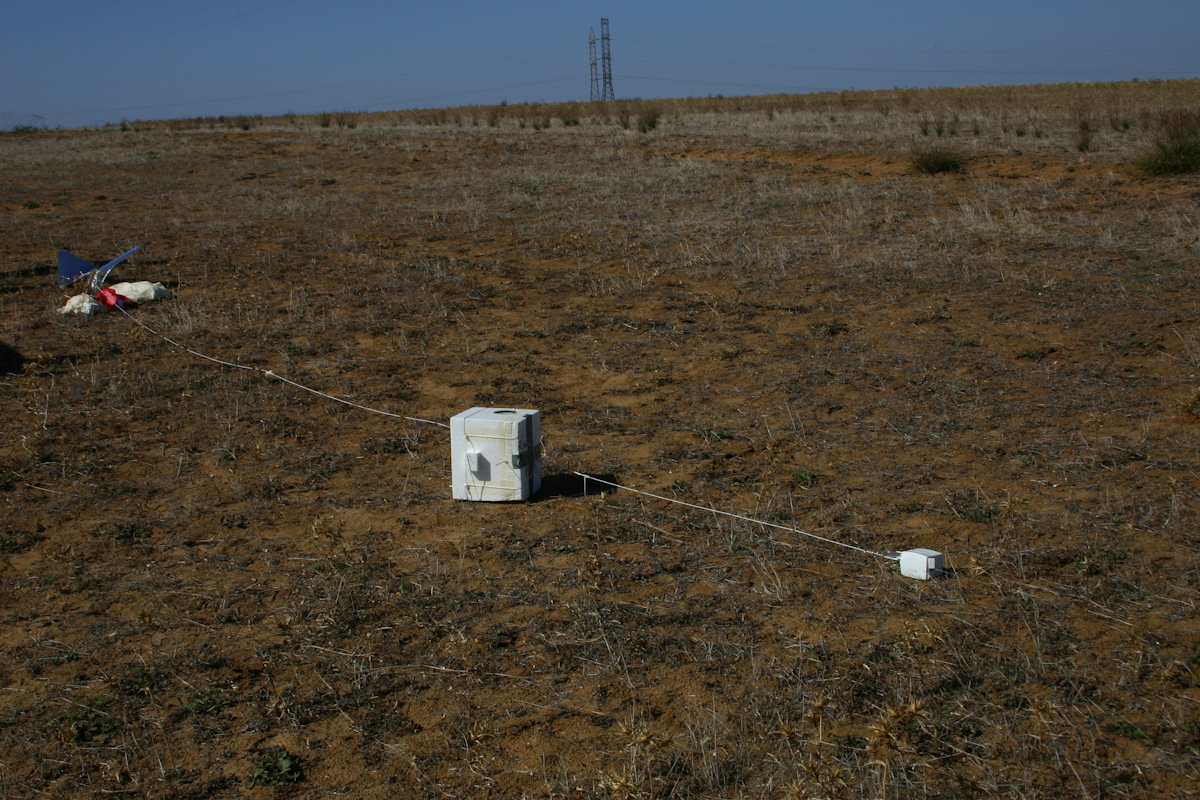
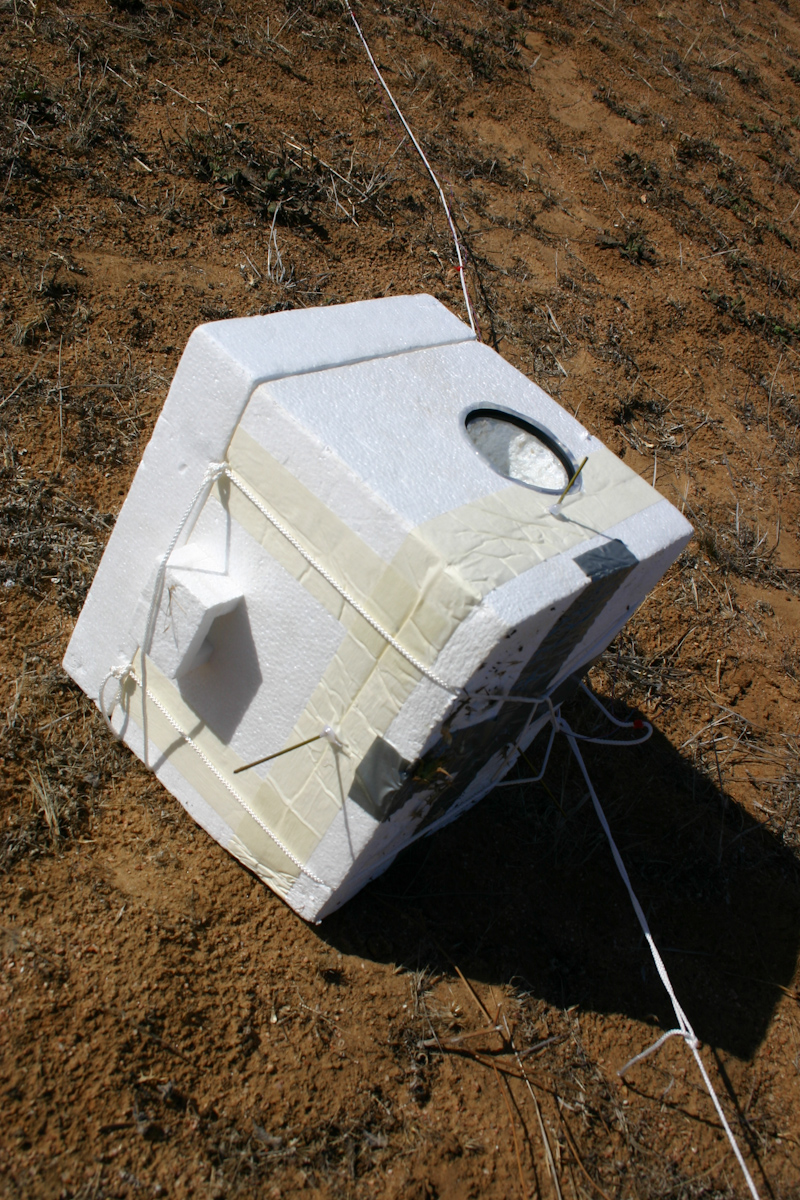
Overall the launch went smoothly, and the payload was receovered OK. The major failings in the launch were that the camera lens filters quickly got fogged up & ruined most of the photos, ascent rate calculations were slightly off, resulting in a much higher ascent rate than planned, and the balloon got tangled around the parachute/radar reflector after burst, resulting in a very high impact speed.
More details in the blog entry.
Lessons learned:
- Balloon filling - more care to be taken with inflation counterweight, bring some scales next time!
- Lens mist - flush the payload with helium to remove atmosphere and moisture
- Line tangling - increase spacing between balloon & everything else
Data:

Horus 1 flight data
Photos: