Airborne repeater update
As I've mentioned before, Adrian's been busy working on the airborne 2m repeater, which we hope to fly soon.
The logic boards are now finished and have been etched & populated, now it's just a question of coding & testing!

The logic board minus ICs
Awesome work Adrian, this is looking very promising! ![]()


Horus 4 launched and recovered successfully
Today saw the launch and successful recovery of Horus 4. This was another attempt at test higher baud rates, which were problematic due to a software bug on Horus 3 - the test was a great success, with perfect decoding at both 200 baud and 300 baud. ![]()

The landing site
A big thanks to everybody who helped out today, especially Adrian VK5ZSN for tracking from home & Paul for helping us get a head start on the payload before releasing it.
The full writeup is here.
Another flight more info
I'm currently preparing for a small low key launch of Horus 4 tomorrow morning (03:00 UTC Friday). I've not sent out an email to the mailing list as the flight will only last an hour or so, and will only attain an altitude of approx 10km. We'll be flying the same payload as Horus 3, with the telemetry software bug fixed.
Expected flight landing is near Harrogate:

Horus 4 predicted flight path
Baud rate will be raised to 200b at 5km, then again to 300b at 6.5km, and will be lowered to 50b after 8000m, or when descent begins.
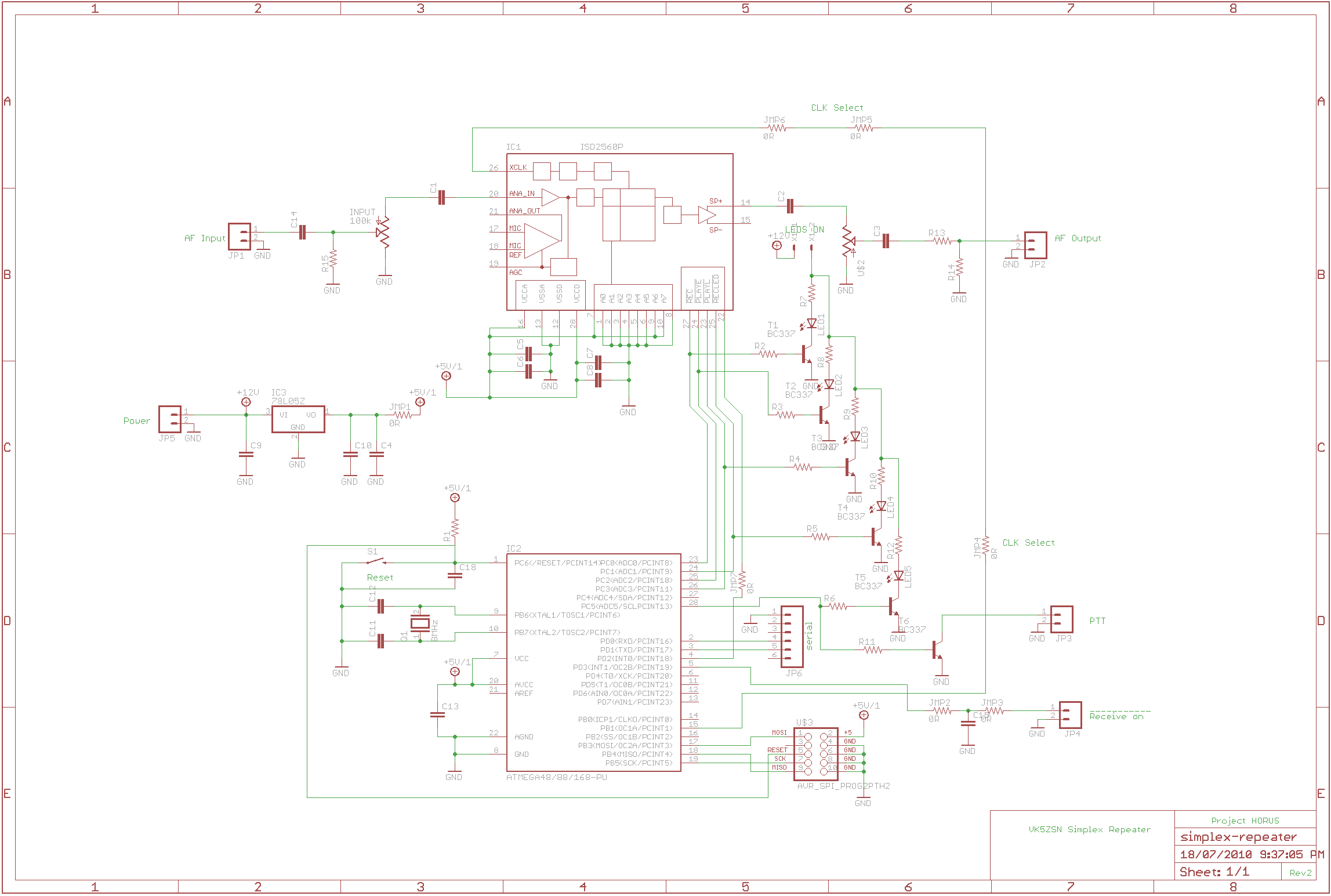
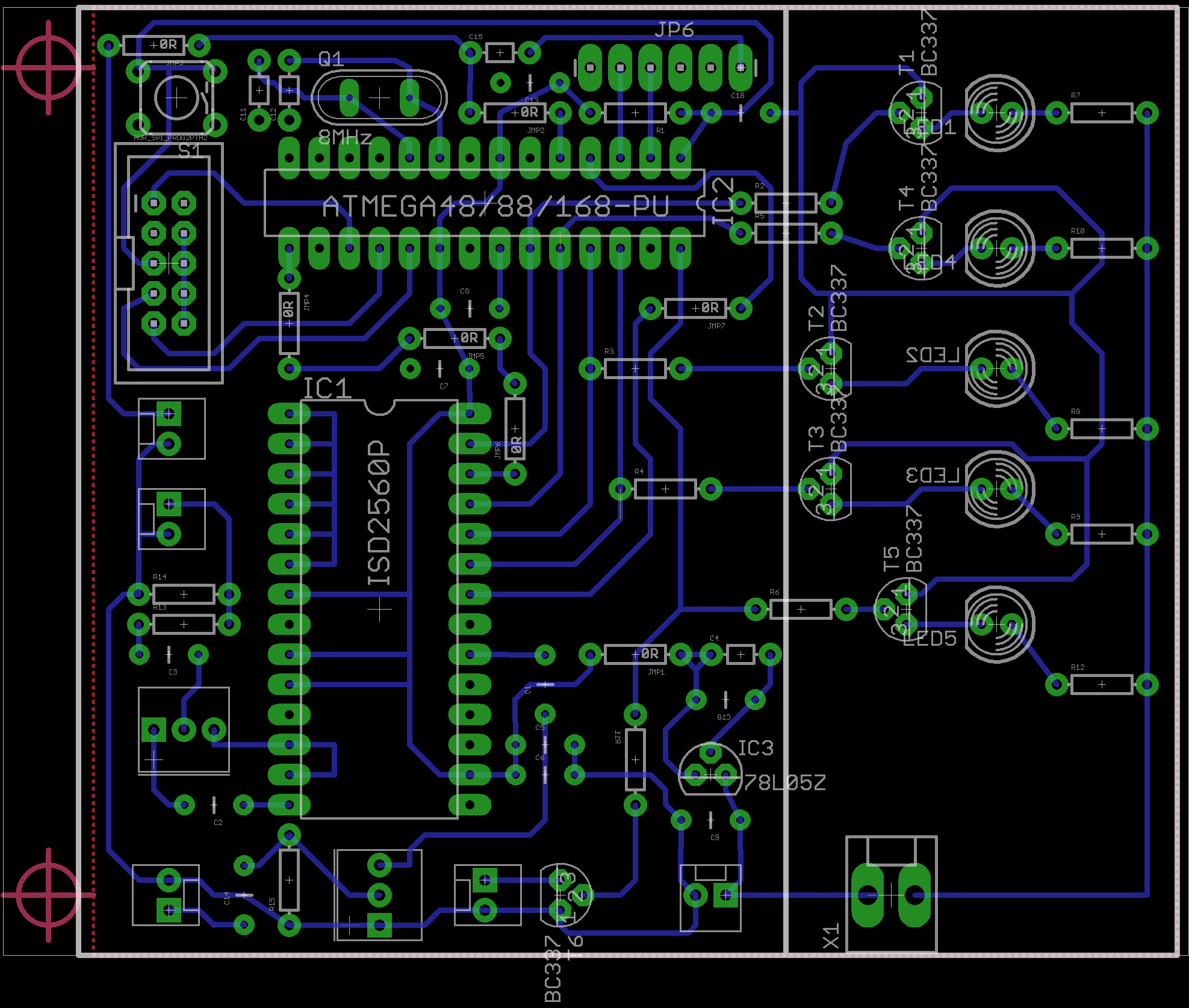
Adrian VK5ZSN has been doing some awesome work on the airborne 2m FM repeater (as well as repairing my 2m mobile rig!) which we will soon be flying. The repeater is being built around a Motorolla GP68 transceiver, ATmega AVR & ISD2560P sound recording IC and will be operating as a simplex repeater offering 60 seconds of record + replay, 1W of TX power & CTCSS coding.

Adrians FM Repeater Schematic

Adrians FM Repeater Board Layout
More information and pictures soon to come! ![]()
Another successful launch!
Horus 3 was launched today at approx 12:10pm & successfully recovered a few hours later.
The weather was perfect, which made launch so much easier, and (almost) everything went exactly as planned. Thanks to the work of natrium42 & jcoxon in getting the dynamic predictor working in conjunction with the tracker, we were actually able to position ourselves and actually see the payload coming down!

Run for the balloon!
I'll post up a full writeup soon The writeup is here - massive thanks to everybody who helped out with tracking & on IRC! ![]()




-

- Run for the balloon!


Launch of Horus 3
After a long hiatus, it's time to launch Horus 3!
Horus 3 will be a re-fly of Horus 2, and will be launched on Thursday the 8th of July, around 12:00 ACST.
Predicted landing site is approx 100km east from launch:

Horus III predicted flight path
Being winter predicting a suitable launch date can be tricky so I do apologise about the lack of prior notice.
As with the last launch both myself and Adrian VK5ZSN will be tracking the balloon in separate cars and keeping in contact using the 2m repeater, likely VK5RMB. If you are tracking the balloon online we would love to hear from you with any updates as we may not have internet access the whole time.
As with the previous flights, the balloon flight & chase cars can be tracked online at http://www.spacenear.us/tracker/.
I don't feel that my new boards are quite well tested enough to fly- so Horus 3 will be flying with the original flight computer used on Horus 2 - I'm hoping to fly my new boards in future launches.
The purpose of this launch is to test higher baud rate communications - the payload will be increasing it's baud rate as it ascends:
0 m - 10,000 m = 50 baud
10,001 m - 13,000 m = 100 baud
13,001 m - 16,000 m = 150 baud
16,001 m - 19,000 m = 200 baud
19,001 m - 21,000 m = 300 baud
> 21,000m = 50 baud.
Once the payload begins to descend, it will revert to 50 baud for recovery. If you're tracking the payload, you'll need to manually change the baud rate in dl-fldigi as the payload passes these altitudes.

Changing the baud rate

Select the new baud rate, then click save
If there are any last minute developments I'll update the blog. If you are tracking and on the repeater we look forward to hearing from you!