Marks been busy!
Mark has been keeping himself busy of late putting together new telemetry systems for our payloads. His most recent board 'MicroNut' is an extraordinarily compact GPS tracker & radio transmitter, capable of operating on 70cm/2m RTTY or full blown APRS depending on the radio module installed.

MicroNut board running APRS
Mark also spent some time in the UK recently, where he launched Horus 15.5 - a shot at the amateur ballooning altitude record. Mark's launch reached 40,575 m, currently the second highest record! ![]()
For all the details, checkout Mark's blog.
A look inside the Project Horus workshop(s)
Whilst we've not seen any Horus launches in the last few weeks, the team have still been busily working away on a few projects in our time off.
Nodepony launch:
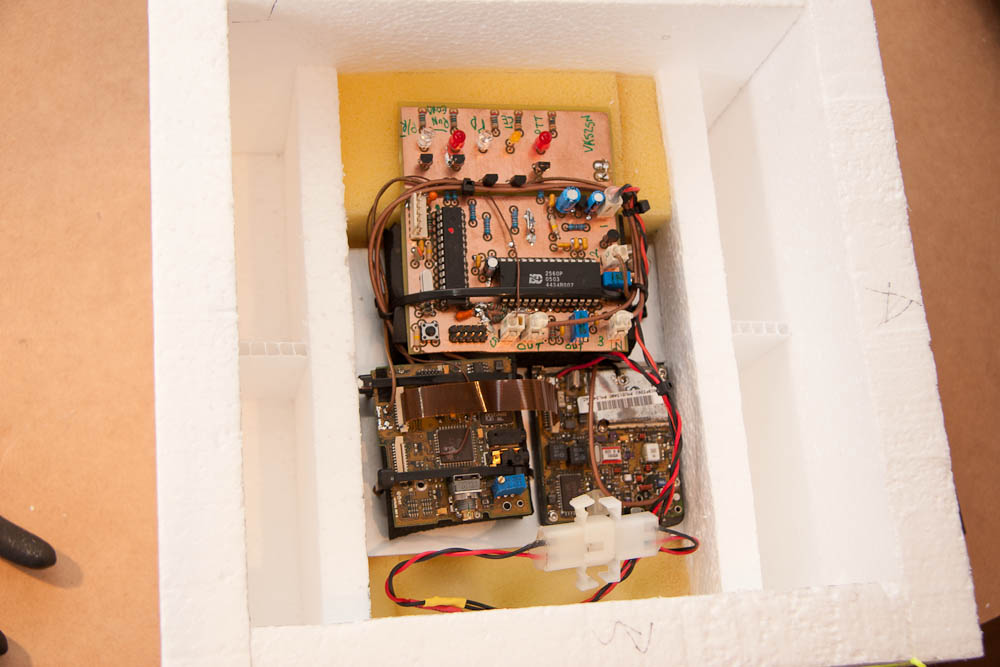
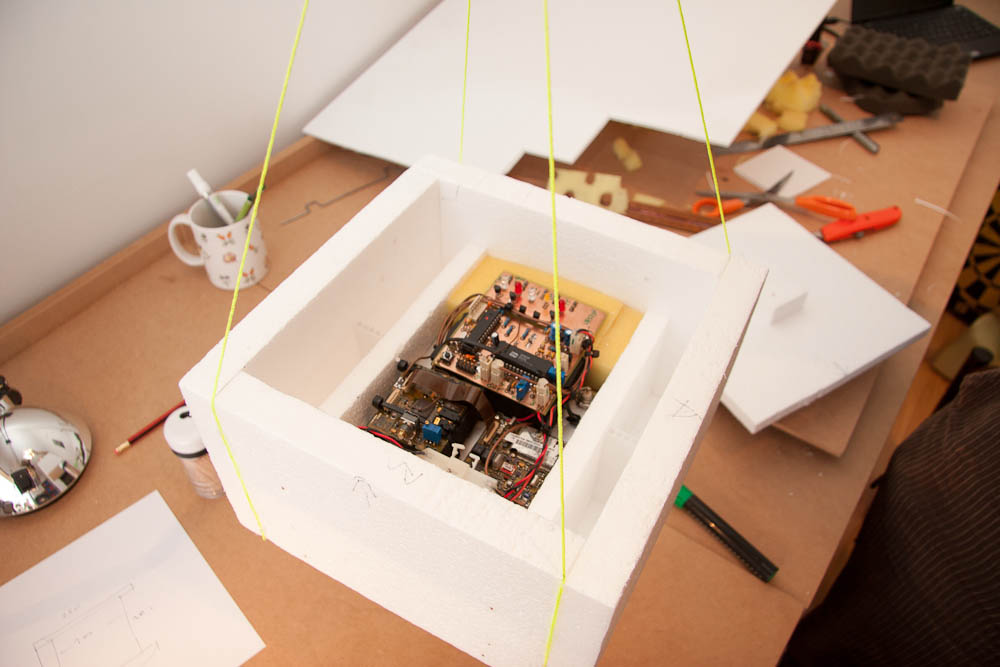
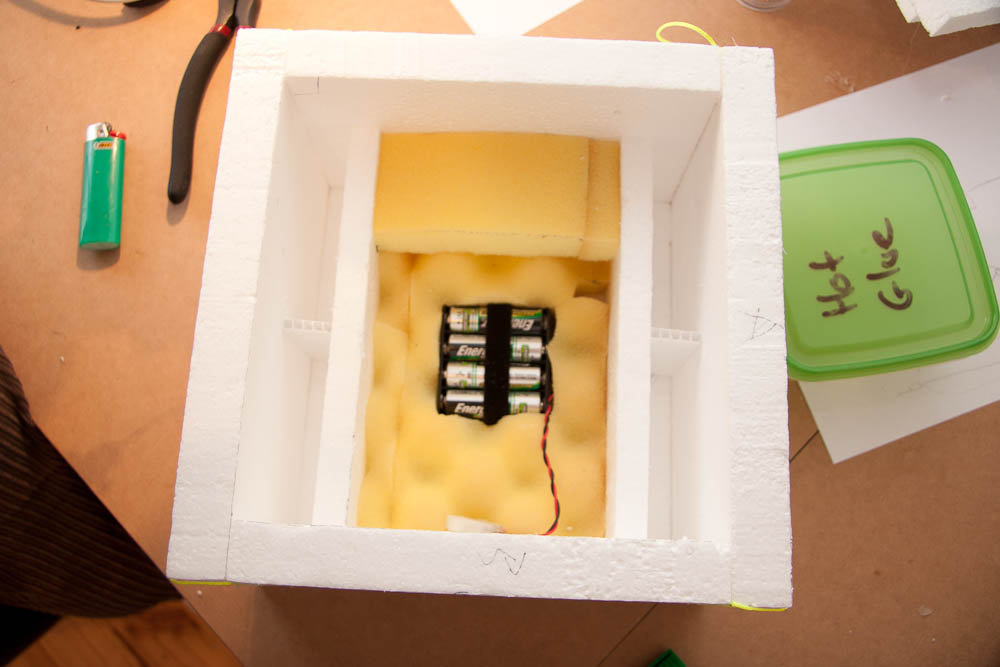
One project that's been on the drawing board for a little while now is the planned launch ofВ Nodepony to near space. I'm hoping to get our brave little volunteer off the ground soon, but not before a bit of modification. ![]()

Nodepony ready to go under the knife
Expect some more details on this one soon... in the meantime the ponies are in my workshop playing with telemetry payloads... none of them have been harmed (yet!) ![]()

Neiigghhhh!
Horus 15 flight video:
Grant's managed to put together a great video from the Horus 15 flight footage - no mean feat given the difficult conditions on the day! With very overexposed footage Grant had to do some aggressive colour correction, but the results are a testament to Grant's editing!
Remote RX site:
Another idea we came up with some time ago was to setup an automated remote receive site and have it strategically located in our flight path. The site could then receive telemetry during flights & relay this information via the internet, and when there are no Horus flights the remote receiver could always be used for things like decoding BOM weather balloons or listening in general.
I recently purchased a Funcube Dongle (a low cost, wideband USB SDR) and have put together a low power remote receive machine.

The remote receiver
The machine is built around a VIA EPIA mainboard, and should consume only a few watts when running - this is important as it'll be running off a solar array when installed. The system is currently pictured with a 240V AC PSU, but this will be replaced with a DC PSU very soon.

The remote receiver
The remote receiver runs Linux & GNU Radio, giving us the ability to demodulate just about anything that fits within the Funcube Dongle's ~80KHz of bandwidth, or (assuming internet bandwidth permits) send the raw I/Q data back to another site.
Mini-Nut:
Mark has been busy working on aВ miniaturized SMD version of my Nut telemetry board, something which is a bit overdue!

Marks Mini-Nut
Mark's managed to squeeze a pressure sensor and miniSD socket onto the board as well - for the full details check out his blog post.
RDF antennas:
Asides from working on Mini-Nut, Mark's been busy working with Adrian & Matt on an array of new direction finding antennas & systems for Adrian's & Matt's trucks.

Adrian in the workshop
Adrian has put together a couple of excellentВ blog posts detailing some of the work they've done.
Project Horus: 2011 beyond
The Project Horus blog has been rather quiet in the last couple of months - this is a bit of an update to let everyone know the project hasn't stalled or died (rather real life just got in the way of ballooning).
The team have given a couple of talks at amateur radio clubs in the last couple of weeks - talks were held at both NERC and AREG.
Mark, Adrian & Joel have been busy in the last few weeks, recovering & hacking Vaisala RS92 Radiosondes with a view to modifying them to work on the amateur 70cm band. Some great progress has been made, with the sondes successfully being reprogrammed to transmit within the band and broadcast an amateur callsign.

Hacking the RS92
We've also been working away on a remoter receive site to be used during launches & for general ham use. The system is based around the excellent Funcube Dongle, a surprisingly capable USB software defined radio receiver. When finished, we hope to have an autonomous tracking station for Horus launches as well as a remotely accessible wideband receiver.
There are also a few plans for future launches this year - one of the main goals is to launch a reasonably powerful amateur TV transmitter, broadcasting video footage from an onboard camera in real time. We're hoping to launch some test payloads soon to test various heatsinks & work out exactly how much heat we can dissipate (and hence how powerful a transmitter we can use).
Stay tuned for more! ![]()
Update future launches
The blog has been a bit quiet since the launch of Horus 6 and Horus 7 - however, we've been busy making plans for future launches & working on new ideas!
Grant VK5GR was good enough to put together a great montage of the stills from the Horus 7 onboard camera - thanks! ![]()
Adrian's repeater parrot repeater payload proved immensely successful on the launch of Horus 6, though as a parrot repeater it was inherently difficult to control with a large number of users. We've decided that as it was an excellent communications platform for our chase cars & launch team, it will be making a reappearance - hopefully as a standard item on our future flights. It's being slightly reworked to make it a little easier to use (to prevent talking over one another), and will have some new features - DTMF decoding (uplink) is planned, with a serial link from the repeater to our main flight computer for control.
With the parrot repeater being used for team communications, we're planning to fly a cross band talk through repeater for the amateur radio community to use at some stage - most likely input on 2m and output on 70cm - those familiar with working with satellites should feel right at home!

We've currently got a few launches in the pipeline, the next of which is planned for 10/10/10 to coincide with the One Day On Earth movement. Grant VK5GR is the driver behind this, he will be producing a segment from the footage/stills we capture to submit to One Day On Earth.
The carputer has also had a bit of a re-factoring after proving itself very useful - I've built a better battery isolator (the diode block I was using wasn't ideal), and have converted it to run on an efficient DC-DC power supply too. Will try to pop some pics of everything up soon... ![]()
Repeater Project Horus at Science Alive
Adrian and I got together a few days ago to put together a payload enclosure for his airborne repeater. All told, the enclosure, batteries + antenna weigh in around 800grams.



Adrian's done a great job on the reapter, it works very reliabily and is fully autonomous, including morse ID & automatic beacon mode to assist with finding the payload should something go wrong.

In other news, Project Horus will be making an appearance at Science Alive at the Adelaide showgrounds as part of national science week - we'll have payloads, balloons & tracking equipment on display, as well as a bunch of other toys, robots & gizmo's Adrian's been busy putting together in his time off! If you are free on Saturday or Sunday, do come by!
Airborne repeater update
As I've mentioned before, Adrian's been busy working on the airborne 2m repeater, which we hope to fly soon.
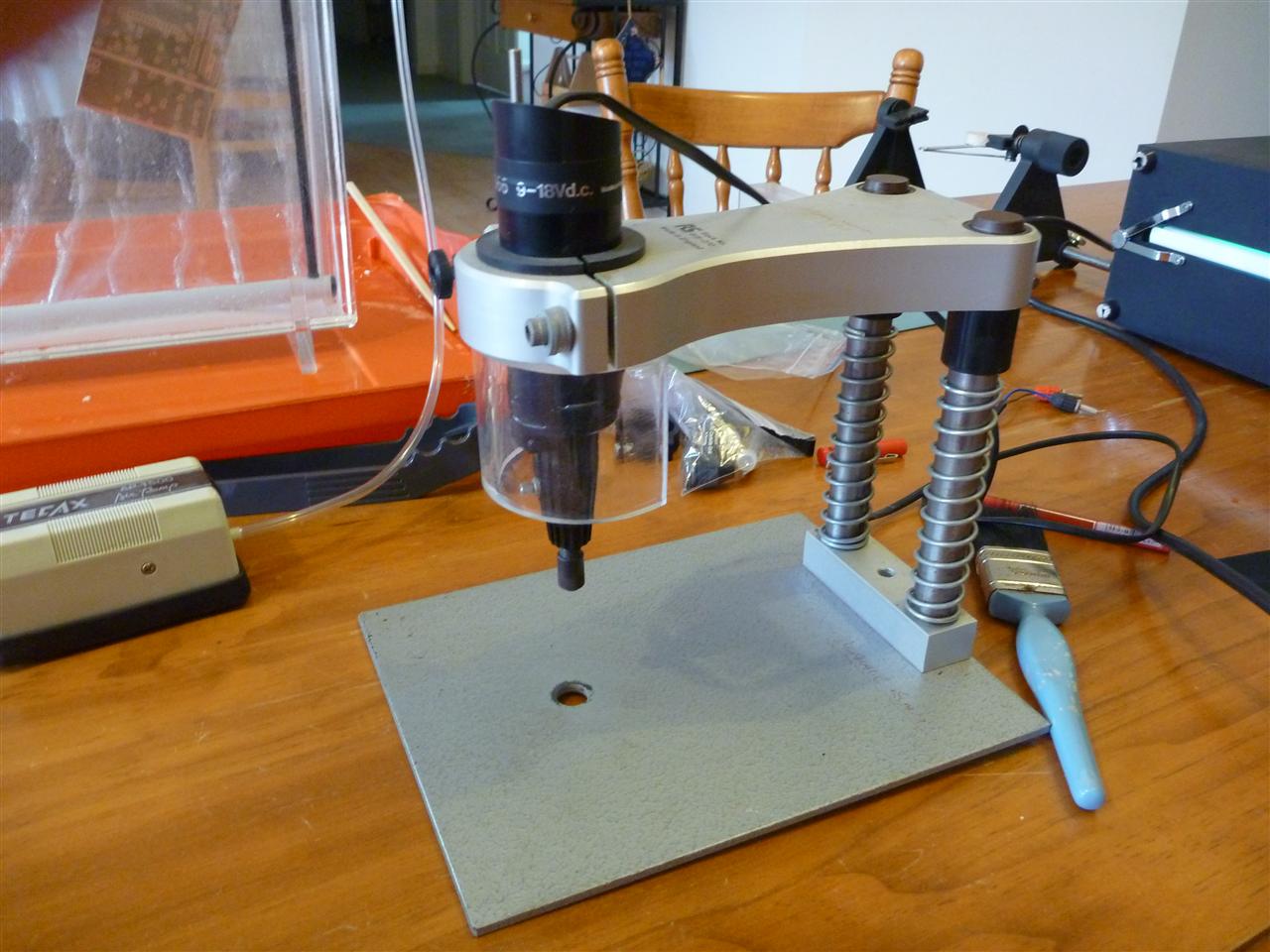
The logic boards are now finished and have been etched & populated, now it's just a question of coding & testing!

The logic board minus ICs
Awesome work Adrian, this is looking very promising! ![]()


Another flight more info
I'm currently preparing for a small low key launch of Horus 4 tomorrow morning (03:00 UTC Friday). I've not sent out an email to the mailing list as the flight will only last an hour or so, and will only attain an altitude of approx 10km. We'll be flying the same payload as Horus 3, with the telemetry software bug fixed.
Expected flight landing is near Harrogate:

Horus 4 predicted flight path
Baud rate will be raised to 200b at 5km, then again to 300b at 6.5km, and will be lowered to 50b after 8000m, or when descent begins.
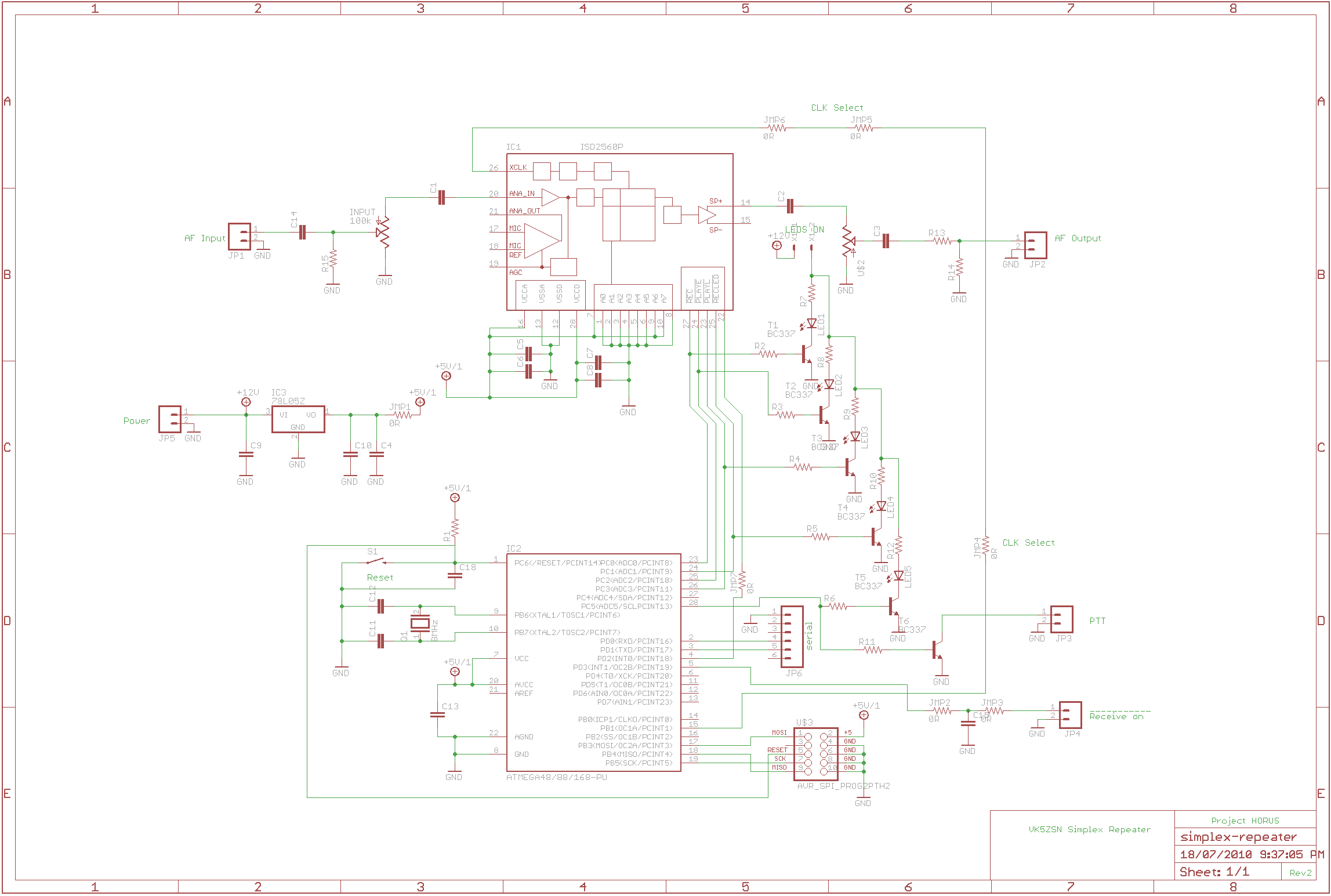
Adrian VK5ZSN has been doing some awesome work on the airborne 2m FM repeater (as well as repairing my 2m mobile rig!) which we will soon be flying. The repeater is being built around a Motorolla GP68 transceiver, ATmega AVR & ISD2560P sound recording IC and will be operating as a simplex repeater offering 60 seconds of record + replay, 1W of TX power & CTCSS coding.

Adrians FM Repeater Schematic

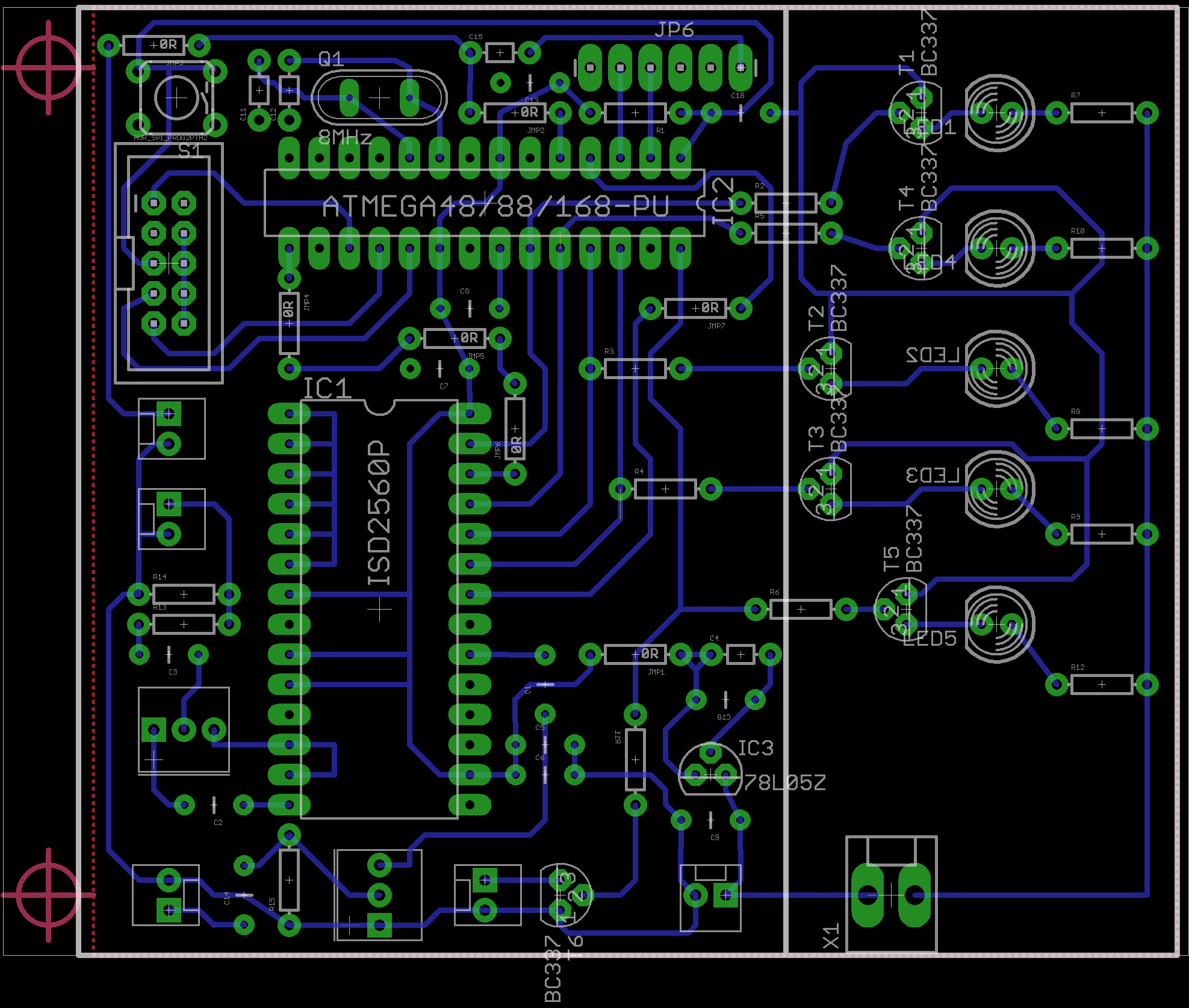
Adrians FM Repeater Board Layout
More information and pictures soon to come! ![]()
New board update
My GPS modules have arrived & I've dropped one into my Nut board. I've also written most of the code needed to get the FSA03 working correctly, many thanks to junderwood for helping me with the UBX protocol. I'll try to get some more testing done soon & put up schematics/instructions asap ![]() .
.
-

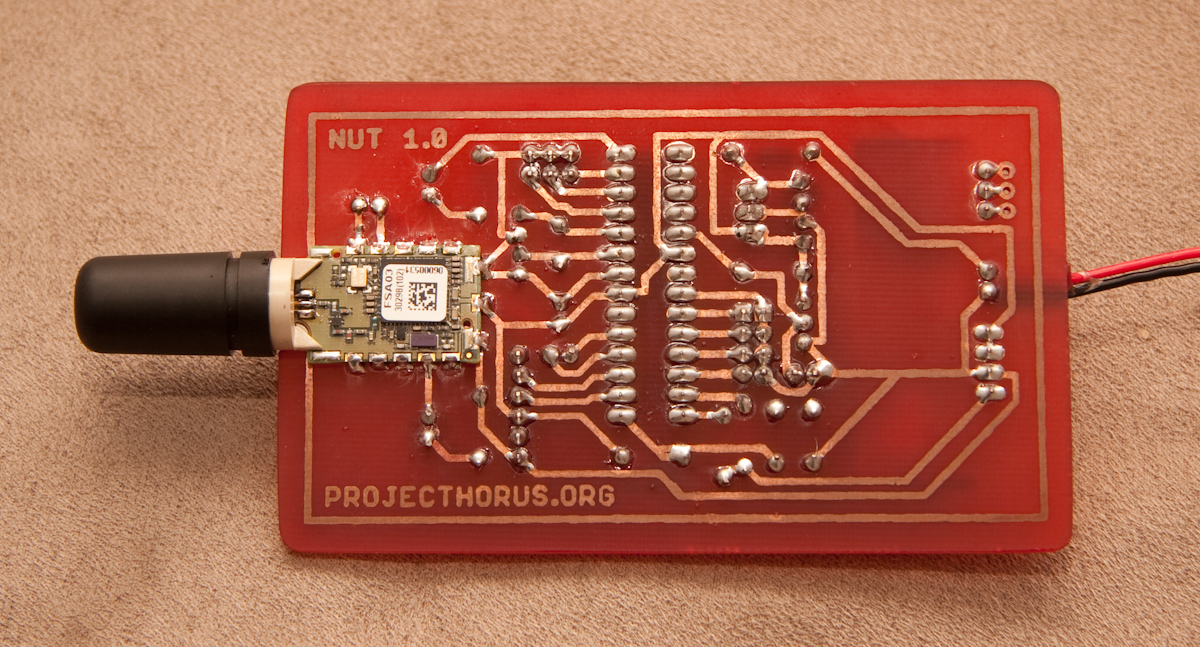
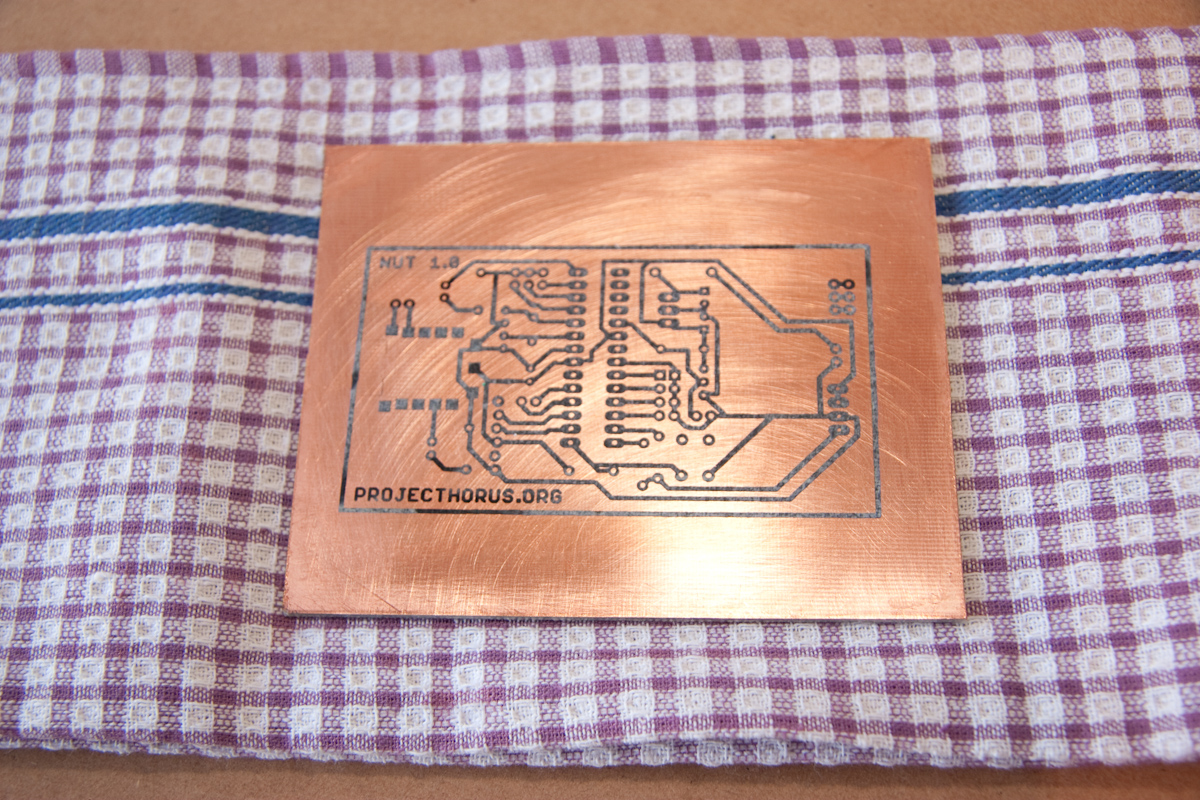
- Nut 1.0
New board build
I had a chance to etch and test my first board with the new design. The board itself seems to be working fine, though I haven't got a radio module or GPS on it at this stage - they're still in the mail on their way to me.
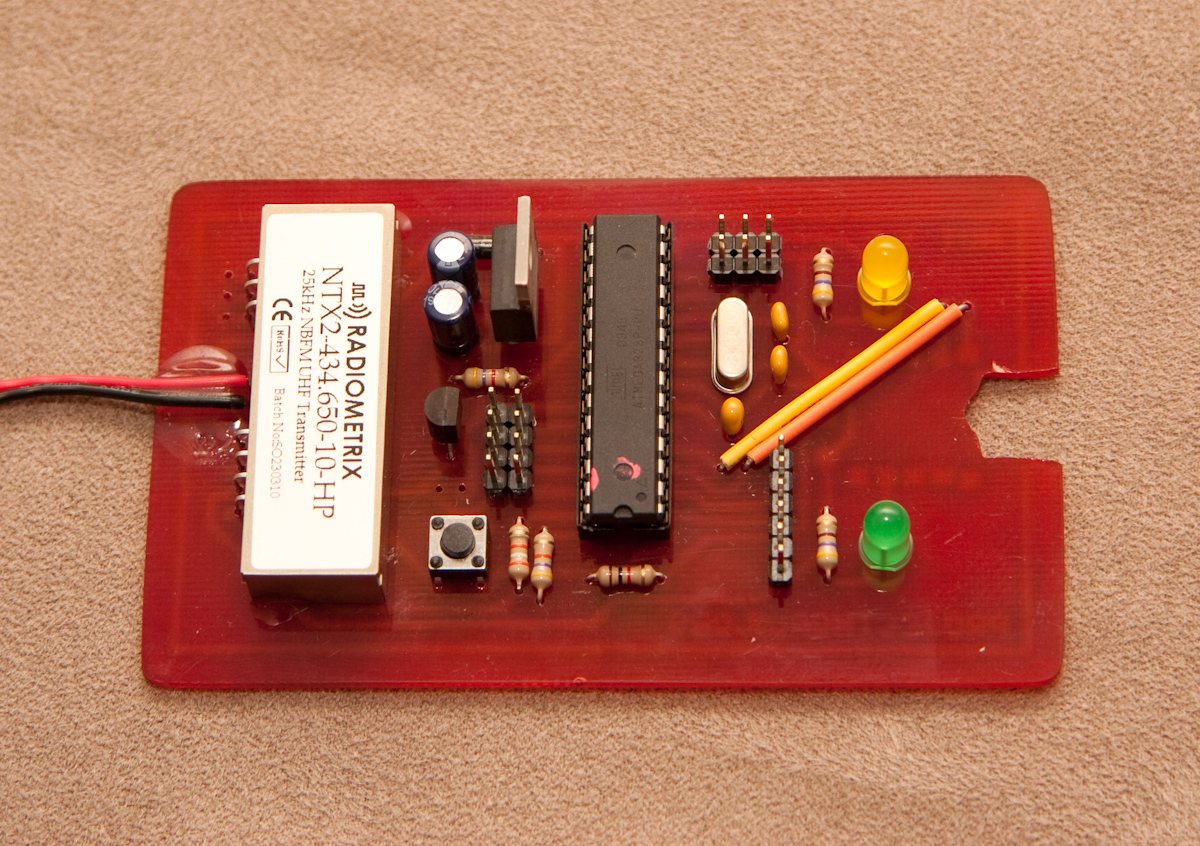
I tired dyeing the board using some permanent markers, which did not work so well. Next I'll be trying red fabric dye, which from what I can tell should have better results.
-

- Design printed
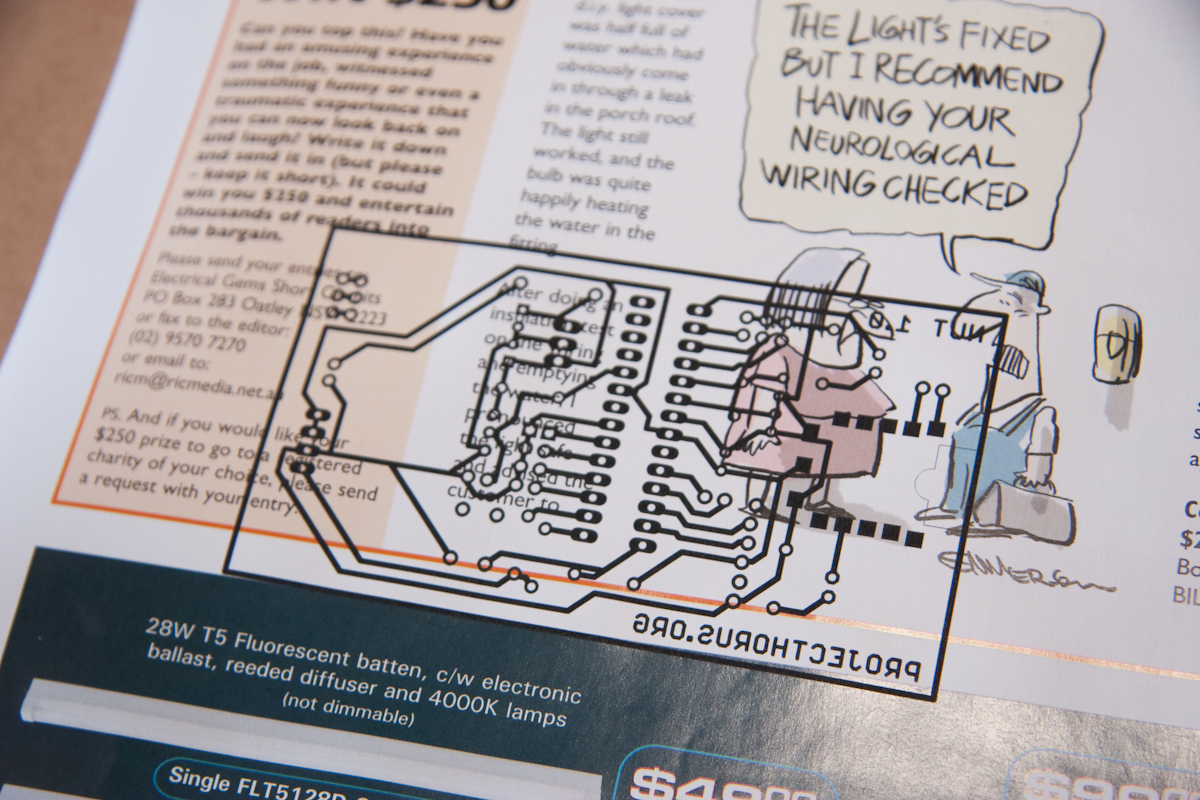
-

- Board scoured and cleaned
-

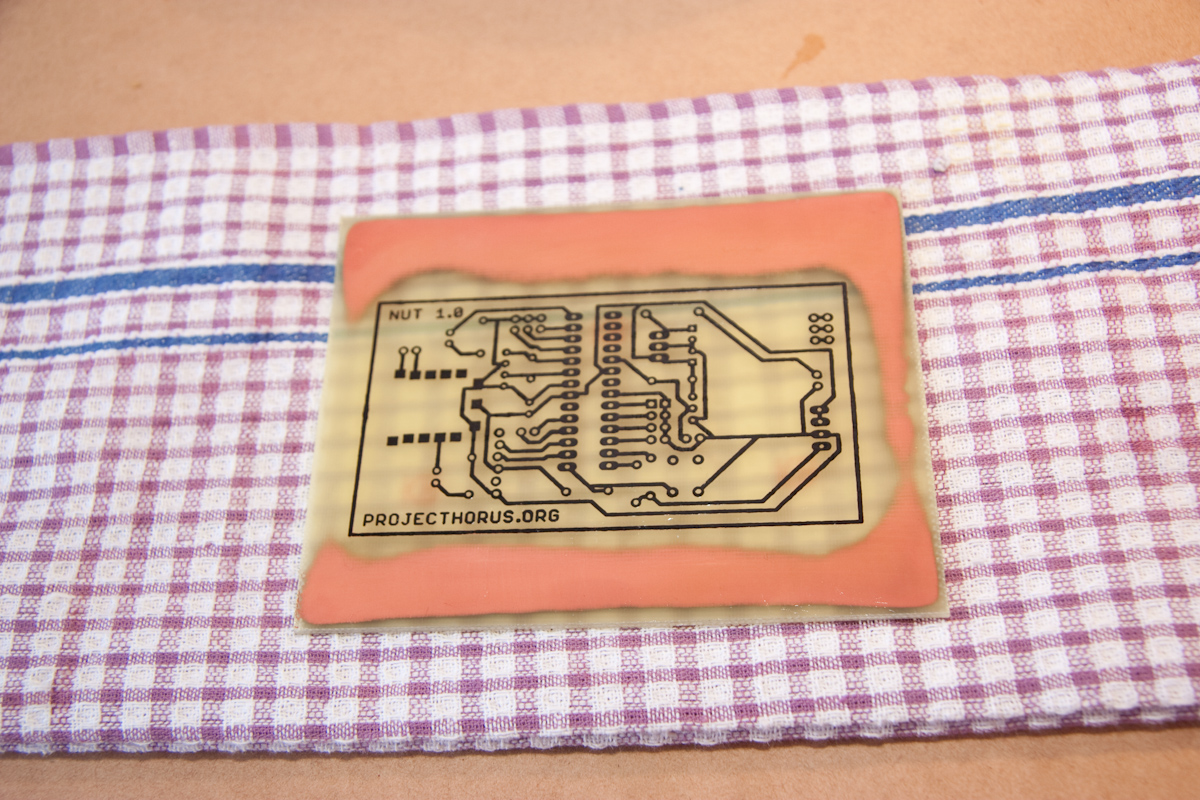
- Toner transfer using an iron

-

- Board submerged in hot water

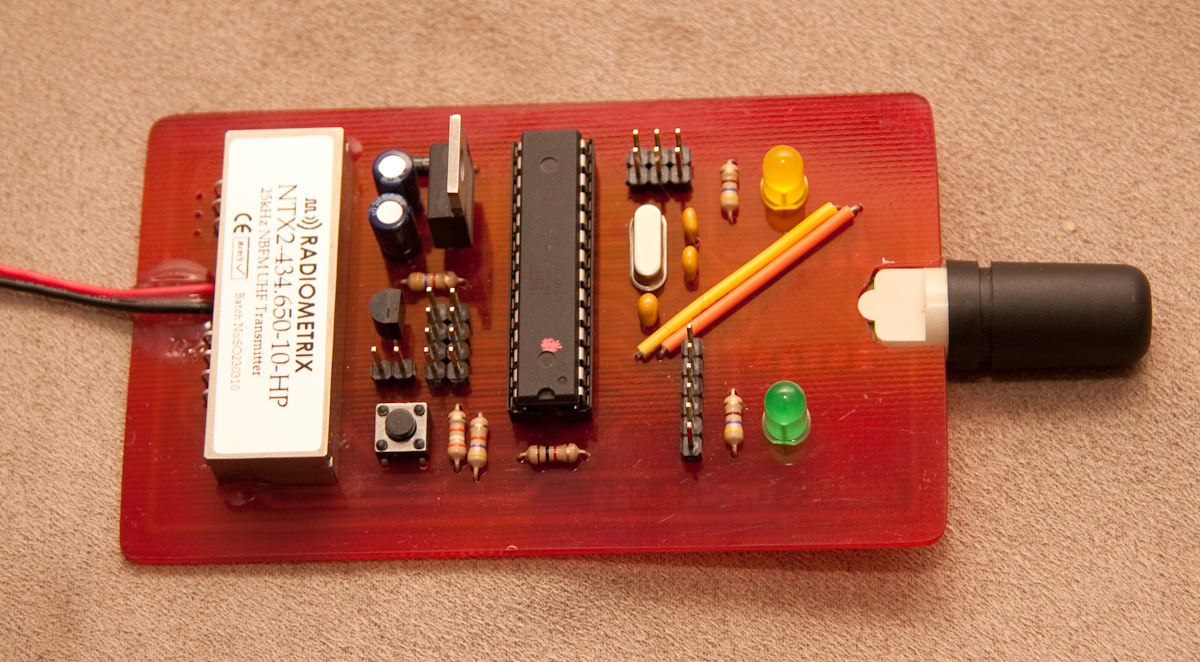
The cost per board works out to around the $100 (AUD) mark:
- PCB substrate: ~$1
- ATMega328P: $5
- LM3940: $1.50
- Temp sensor: $5
- Passives: ~$1
- FSA03 GPS module: $60
- NTX2 25mW Module: $30
Total: ~$103.50
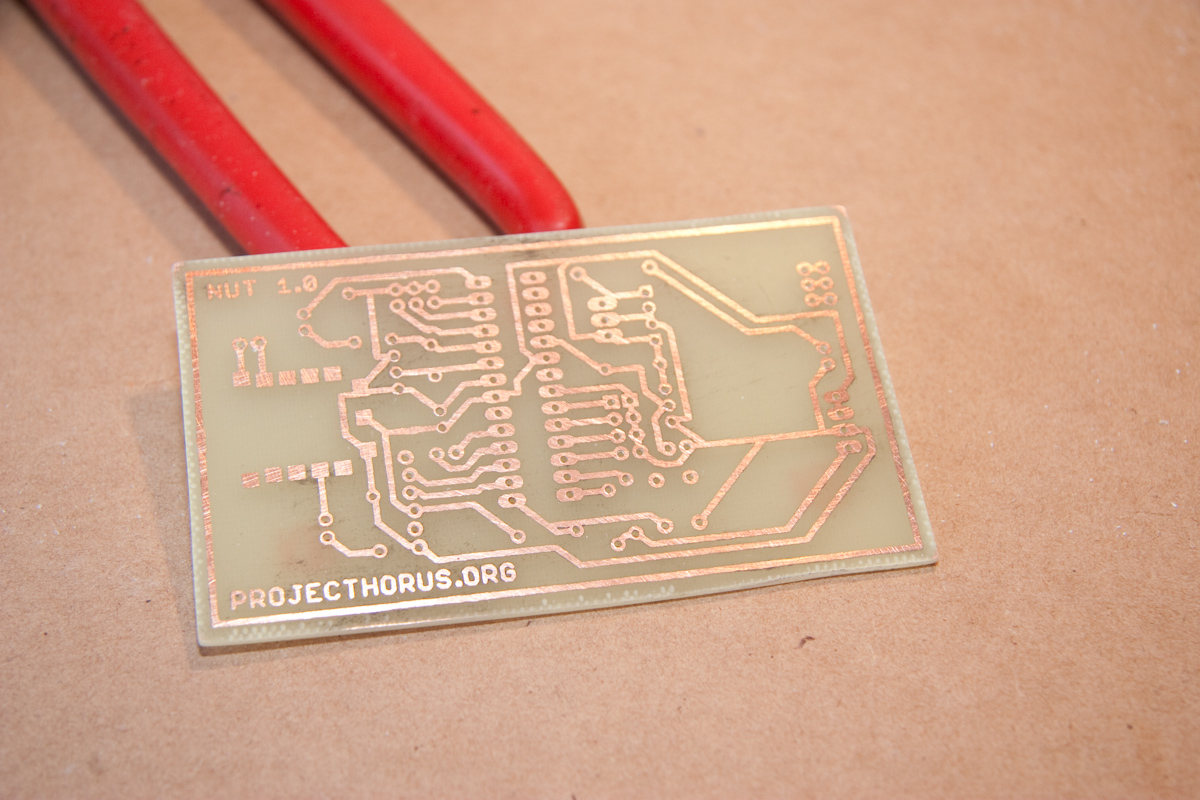
Edit: The fabric dye worked a treat!
Current state of affairs
As is evident by the number of recent blog posts, Project Horus has seen a bit of an unplanned hiatus over the last few months - both myself and Adrian VK5ZSN have been kept busy by real world commitments of one kind or another. The project has not been abandoned, and we're hoping to launch again soon - initially I'd like to re-fly Horus 2 (telemetry baud rate experiment).
There have been a few new developments of late:
New flight computer (Nut 1.0):
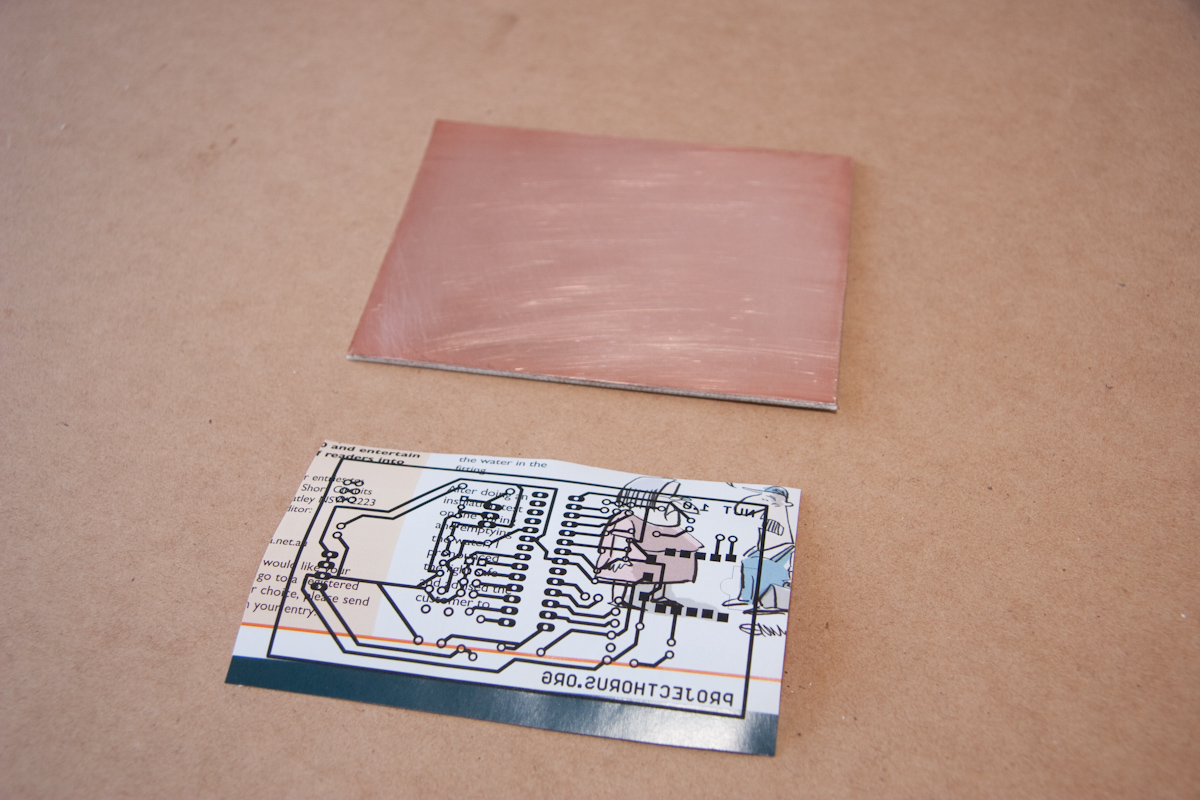
I've received several emails asking me if I had any spare Isis boards for sale, or any other boards which were 'ready to go'. I don't have have any boards on hand, but I've been working on a design for a board which implements a whole balloon tracker & can be etched at home on single sided copper clad without any fancy equipment.

The single sided board
I've not yet made up a full board & tested it yet - I'm waiting on components to arrive at this stage, but should have a complete board ready this week. Once this is tested & I'm confident it's up to scratch, I'll be posting the full schematic and board layout, as well as a step by step guide on how to etch, populate & program the board yourself.
Balloon-borne simplex repeater:
Adrian VK5ZSN is working on a simplex repeater to be flown on an upcoming balloon flight. This is being built around a 2M FM transceiver, a sound recording IC & a PIC for control & logic. The repeater will accept incoming transmissions of upto 60 seconds, which will then be re-broadcast from the balloon. At apogee, we should be able to make contacts within a 500km radius (or so) of the balloon!
Eventually we'd like to fly a true duplex repeater - this would give us an excellent communications platform whilst chasing the balloon.
Carputer:
I've improved the carputer somewhat - it's no longer broadcasting an ad-hoc Wi-Fi network, rather it sports a WRT54G powered by the computer''s internal 12v supply. This allows for much greater range & far better throughput. The carputer also has a new GPS module - a SIRFIII based module, which is much more sensitive than the previous module which often took several minutes to gain lock.
More updates soon (I promise). ![]()